
Nous nous retrouvons dans les locaux de notre partenaire TSF le 27 avril 2023 pour notre troisième session de récolte de métadonnées optiques (MDO).

Thomas Bataille, Valentine Lequet et Grégoire Ausina / Banc d’essai TSF
Dans le cadre de notre étude technique, qui s’étend de la prise de vues à la post-production, nous intégrons une variété d’optiques et de corps caméra. Certaines de ces optiques peuvent générer des métadonnées, mais cela nécessite une compatibilité avec plusieurs éléments : les montures, les câbles, les boitiers lecteurs de LDA, et les générateurs de timecode. Assurer cette compatibilité est un point critique de nos tests. En outre, il est essentiel de vérifier que les loueurs disposent bien de tous les équipements nécessaires.
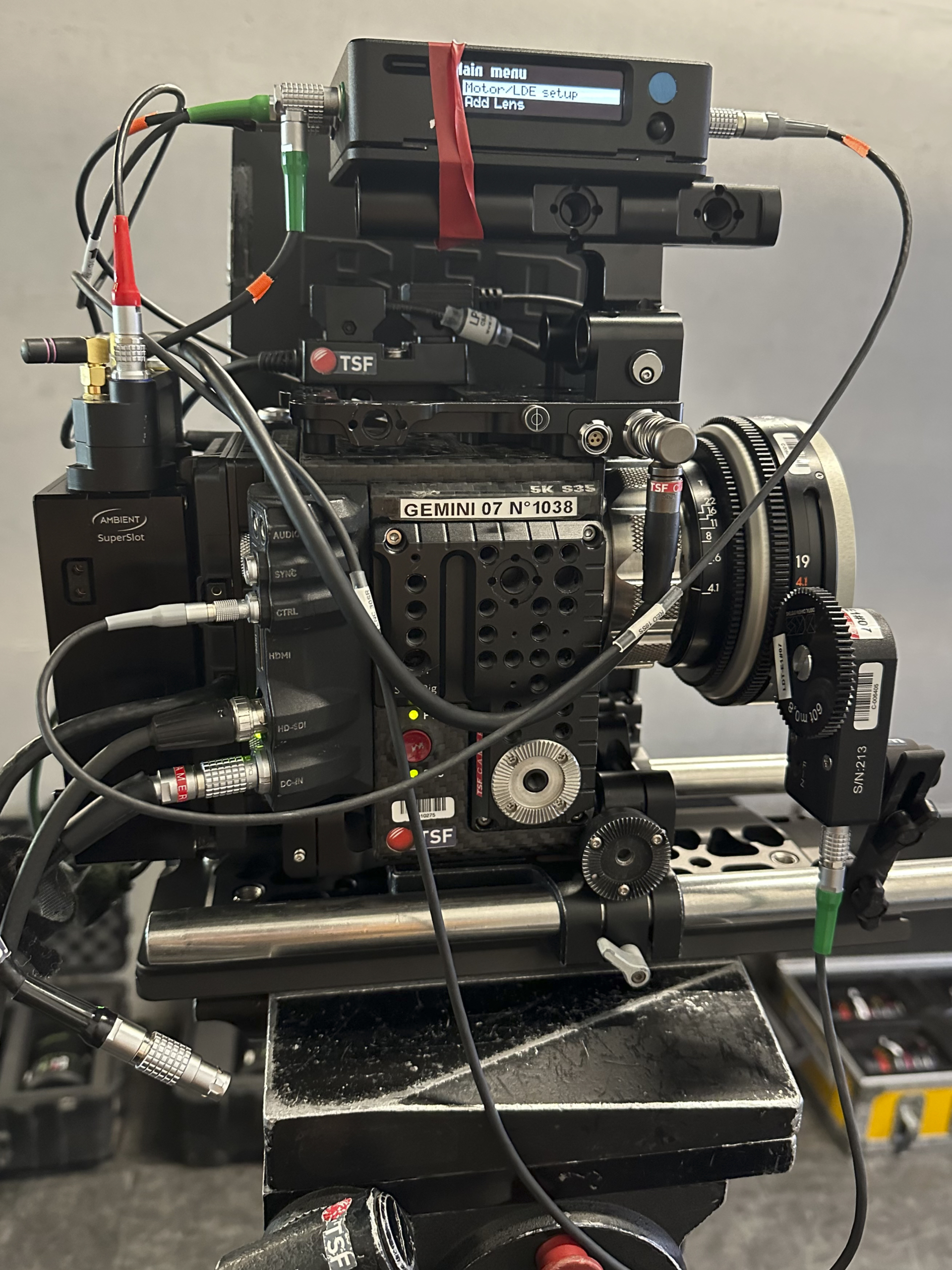
Pour prolonger les essais et tenter de dépasser notre premier échec avec le boitier LDT-R2 de DCS, TSF a mis à notre disposition une série de Kowa Vintage FF sphériques ainsi qu’une RED Gemini 5K DMSC2.

L’objectif est ici de voir s’il est possible d’inscrire des métadonnées optiques de type FIZ (donc les métadonnées primaires de type Focus/Iris/Zoom) dans les fichiers image de la caméra. Nous devons trouver comment produire ces métadonnées à partir de ces optiques vintage qui sont totalement dépourvues d’électronique.
Pour ce faire nous devrons utiliser la roue codeuse LDT-E1 associée au boitier LDT-R2.
Description et réglage du dispositif
Fidèles à notre protocole, nous passons un 19mm (T4.1), la caméra positionnée face à une mire de déformation.
Le boitier Ambient Lockit+ est alimenté via le port V-Lock de la caméra.
Le port TC out du Lockit+ est connecté au TC in du boitier LDT-R2
Le port CAM du LDT-R2 est connecté au port CTRL de la Gemini
L’encodeur LDT-E1 (out) est relié au port ENC (in) du LDT-R2
Le port PWR du LDt-R2 est alimenté via DTAP.
Dans le menu caméra de la Gemini: Settings > setup > communication > serial (ctrl protocol = element technical).

Dans le menu du boitier Lockit+: Cam port en RED-ET, Serial port en DCS-IO, DCS protocole (RAW encoder enabled, tilt roll enabled).
Enfin nous ajoutons un moteur C-Force mini RF ainsi qu’une commande Hi-5.
Côté réglages caméra, nous choisissons un iso à 800, en 25 fps, capteur 5K ratio 1.7:1 et rec en RAW 8:1
Un test concluant
Consulter les documentations constructeur, récupérer les câbles nécessaires, comprendre et faire le choix des réglages dans la caméra et les boitiers, tout cela prend un certain temps… Sans disposer de LDA pour la série Kowa, nous devons en outre créer une LDA manuellement, au moins pour l’optique choisie pour nos tests (à multiplier avec toutes les focales de la série !).
Après un premier enregistrement qui ne semble pas concluant, nous modifions un ultime paramètre dans le menu de la Gemini : Settings > Setup > Lens (désactiver “Enable power to Lens” et “Auto Detect PL Lenses” – nous devons alors recalibrer la roue encodeuse LDT-E1). Nouvel enregistrement incluant une bascule de point.
Après vérification sur un ordinateur via le RED Player, les MDO apparaissent bien dans le fichier RAW R3D, incluant la focale, la distance focale et les variations résultant de la balance de point !
Il faut noter qu’apparaissent également les données de tilt et roll issues non pas de l’optique ou de la caméra mais du boitier LDT-R2, qui a la capacité de générer des données gyroscopiques.

Nous avons vu qu’avec la Sony Venice 2, le LDT-R2 n’est pas encore pleinement opérationnel (il manquerait la fameuse « specialist mount » tandis qu’avec une caméra Arri, le LDT-R2 n’est pas opérant, le boitier Ambient Lockit+ et l’UMC-4 d’Arri étant complémentaires dans le cas où toutes les informations ne pourraient pas être inscrites dans les fichiers image via la monture PL/LPL
En revanche, dans un écosystème RED il pourrait s’avérer être un vrai plus.
Et après ?
À l’issue de cette phase de tests divers, plusieurs reflexions :
- Ces configurations nécessitent un temps particulièrement long pour vérifier la chaine des données de bout en bout. Sachant que pour le moment, nous nous sommes contentés de vérifier la présence des métadonnées que nous avons tournées. La prochaine étape nous amènera en post-prod à évaluer quelques plans pour comparer les distances réelles avec les solutions de track 3D. Mais on peut raisonnablement imaginer qu’en production le temps des essais et les incertitudes sur la faisabilité technique doivent être compliqués à gérer.
- Les dispositifs (protocole, boitiers, « specialist mount ») sont en cours de développement et nécessitent parfois un support technique en direct avec les concepteurs. En effet, on pousse les systèmes à leurs limites et il faut parfois trouver de l’aide auprès des experts, et les manuels en ligne ne sont pas toujours à jour.
- Nous avons vu qu’il est possible d’assigner des métadonnées à des optiques qui en sont intrinsèquement dépourvues, mais cela demande un effort conséquent pour un résultat bien moins riche et précis qu’avec des optiques électroniques « modernes ».
Autrement dit, l’utilisation d’optiques vintage sur des films nécessitant des VFX est un petit défi technique qui devrait vraiment se justifier artistiquement, surtout quand on voit arriver des systèmes clés en main développés par certains constructeurs. - La prochaine étape de ce travail se fera en post-production, afin de démontrer l’utilité des MDO avec nos médias. L’idée est notamment d’expliquer le principe du tracking 3D (comme solution calculée du mouvement de la caméra virtuelle dans l’espace) pour comprendre le bénéfice que peut représenter un tracking live (position physique de la caméra mesurée pour créer la caméra virtuelle) avec des dispositifs comme Cincraft Scenario dont la version 2 vient tout juste de sortir chez Zeiss ou Eztrack avec qui Cooke a créé un partenariat.
Avec des équipements en actuellement en développement constant, cette étude dédiée aux MDO laisse donc entrevoir d’autres sessions à venir. Nous nous en ferons sans aucun doute l’écho.
Merci à Valentine Lequet coprésidente de l’UCO, Sarah Guillaumin Haddad, Charlotte Michel, Sara Cornu, Thomas Bataille.
Un grand merci à toute l’équipe de TSF pour leur accueil et leur implication.
